Принцип Аккермана в рулевом управлении.
Принцип Аккермана определяет геометрию рулевого управления, которая применима для любых транспортных средств, с целью обеспечения корректного угла поворота рулевых колес при прохождении поворота или кривой.
До того, как принцип был разработан, транспортные средства того времени (с лошадиной тягой) были снабжены параллельными рулевыми рычагами и страдали от плохих характеристик рулевого управления. Рудольф Аккерман известен разработкой принципа использования наклонных рулевых рычагов, который устраняет эту проблему рулевого управления в транспортных средствах.
Почему и как?

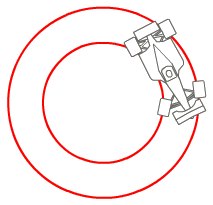
Рисунок изображает автомобиль, идущий через поворот (в данном случае, поворот бесконечен). Красные линии изображают путь, по которому движутся колеса. Вы можете заметить, что внутренние колеса автомобиля следуют по окружности меньшего диаметра, чем внешние колеса.
Если оба колеса повернуты на одинаковую величину, внутреннее колесо будет скрестись по дороге (будет скользить боком) и будет снижать эффективность рулевого управления. Это скольжение колеса, которое также создает нежелательный нагрев и износ колеса, может быть устранено с помощью поворота внутреннего колеса на больший угол, чем угол поворота внешнего колеса.
Различие в углах внутреннего и внешнего колес может быть лучше понято путем изучения рисунка, где помечены внутренний и внешний радиусы, по которым движутся каждое из колес. Внутренний радиус (Ri) и внешний радиус (Ro) зависят от ряда факторов, включая ширину автомобиля и крутизну поворота, который собирается пройти автомобиль.
Расположение обоих колес в надлежащем направлении движения обеспечивает стабильное управление без чрезмерного износа и нагрева каждого из колес.
Очевидно, что при повороте одного из колес более, чем другого, вы рассогласовываете направление колес и вам нужно это сделать в то же время обеспечивая прямое направление обоих колес, когда автомобиль не поворачивает. Для обеспечения этого, необходимо, чтобы рассогласование направления росло от нулевого значения (колеса направлены прямо вперед) до точки, в которой существует значительное различие в углах между обоими колесами (при максимальном повороте колес).